
搜索结果: 1-15 共查到“控制科学与技术 巡检”相关记录28条 . 查询时间(0.083 秒)

智能巡检机器人护航冬供(图)
智能 巡检机器人 中国石化
2024/1/11
日前,华北油气分公司东胜气田在集中处理站投用智能巡检机器人,进一步提升场站安全管理水平。这款机器人能够按照既定路线对46个点位进行仪表识别读数、气体泄漏检测、液位计识别等。
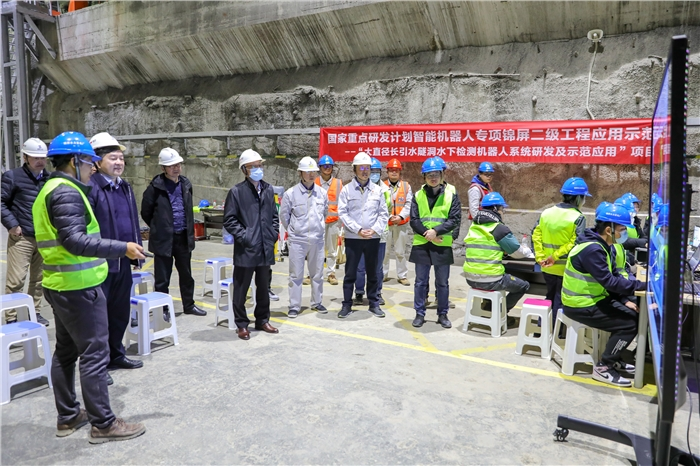
近日,由中广核研究院有限公司牵头的国家重点研发计划“智能机器人”重点专项“大直径长引水隧洞水下检测机器人系统研发及示范应用”在雅砻江锦屏二级水电站引水隧洞完成示范应用,机器人各项性能指标满足现场工程巡检要求。
中国电力科学研究院主导的一项无人机巡检IEEE国际标准立项
变电站 巡检无人机 IEEE国际标准
2023/2/27
2023年1月31日获悉,中国电力科学研究院有限公司在变电站无人机巡检领域主导发起的电气和电子工程师协会(IEEE)国际标准提案《变电站巡检无人机推荐使用方法》(Recommended Practice for Use of an Unmanned Aerial Vehicle for Substation Inspection)获批立项。这是世界首项变电站无人机巡检领域的国际标准。

中国科学院沈阳自动化研究所输电线路智能巡检研究获进展(图)
架空输电线路 绝缘子串 检测 缺陷识别
2021/8/13
架空输电线路是电网的核心,其安全稳定运行关系到整个电网的效益和稳定。作为架空输电线路的重要部件,绝缘子串是输电线路目标和缺陷识别的难点和重点。目前,对于基于深度学习的目标定位和识别方法,需要以特定点为中心,通过对特定长宽比和尺度的区域进行分类来完成目标识别。对于大长宽比的目标,受角度未知的影响,识别过程中需要沿着特定基准方向对检测区域进行旋转来完成。然而,基准方向的个数的确定和如何降低由于多方向检...
双履带式巡检机器人翻越圆边凸台的滑移稳定性分析
双履带式巡检机器人 圆边凸台 越障动作 滑移稳定性
2018/10/8
重点针对工厂的圆边凸台障碍,规划了双履带式巡检机器人翻越圆边凸台的越障动作.将机器人翻越障碍过程视为准静态过程,从静力学角度建立了三个关键阶段的稳定性分析模型,并通过数值模拟仿真分析,得到了机器人翻越过程中的等效支撑力和等效摩擦力与机器人角度之间的关系,为双履带式巡检机器人翻越圆边凸台提供了稳定性分析依据.

中国科学院沈阳自动化研究所等山区输电线路巡检机器人完成山区试验(图)
山区 输电线路 巡检机器人 山区试验
2014/4/4
近日,由浙江省丽水市电业局与中国科学院沈阳自动化研究所合作研制的山区输电线路巡检机器人,成功完成了输电线路自动化巡线及缺陷隐患排查现场试验。此次试验的成功为该系统的改进完善和实际应用奠定了基础,也使丽水市输电线路运维工作开启了智能化的新篇章。
“超高压输电线路巡检机器人技术与系统”通过验收
超高压 输电线路 巡检 机器人
2012/8/14
2012年8月3日,国家科技部863计划智能机器人主题专家组对中科院沈阳自动化研究所承担的“超高压输电线路巡检机器人技术与系统”项目进行了验收。验收专家组一致认为该项目完成了合同规定的任务,同意通过验收。
“超高压输电线路机器人巡检与维护系统”项目通过技术鉴定
超高压 机器人 项目
2010/1/13
2010年1月5日,中国电机工程学会在沈阳组织召开了“超高压输电线路机器人巡检与维护系统”项目技术鉴定会。鉴定委员会由来自东北大学、辽宁省电力公司、南开大学、国网电力科学研究院、中国电力科学研究院等单位的9位专家组成。
超高压输电线路巡检机器人和绝缘子检测机器人通过验收
超高压输电线路巡检机器人 绝缘子检测机器人
2009/7/28
2009年7月15日,东北电网有限公司组织召开了科技项目验收会,由中科院沈阳自动化所机器人学国家重点实验室研制的“超高压输电线路巡检机器人”与“绝缘子检测机器人”两项科技项目通过验收。
变电站设备巡检智能移动机器人(2007)
机器人 巡检 变电站设备
2008/11/26
该机器人包括系统电源、机器人本体、控制器、摄像机、图像及数据无线传输系统(机载部分),地面移动基站包括发电机、监控系统、图像及数据无线传输系统(基站部分)及监视器。该机器人能够在超高压输电线路上沿架空地线自主行走并跨越杆塔上的障碍,平均速度为1km/h,每天巡线时间4~5小时。携带的摄像机作为检测装置,用于检测输电线、防震锤、绝缘子和杆塔等输电设备的损伤情况,并将检测到的数据和图像信息经过无线传输...
变电站设备巡检智能移动机器人(2005)
变电站 机器人 设备巡检
2008/11/26
该课题研制出一台用于变电站设备巡检的智能移动机器人产品样机,要求其基本功能能够满足变电站设备巡检的实用化需求。系统正在进行现场调试。其中机械和防护系统、红外热成像系统、机器人性能仿真、运动控制系统、运动目标检测系统、基站监控系统、移动站软件系统已经完成,行业规划与避障系统、远程仪表检测与指针读取系统,基于声音信号的设备异常检测正在调试中。已通过济南500kV变电站的现场试验,机器人系统所有设备运行...
110KV输电线路自动巡检机器人
110KV输电线路 自动巡检 机器人
2008/11/24
在国家863计划机器人技术主题的资助下,我们开展了110KV 输电线路自动巡检机器人的研究工作。依据输电线路的特点,设计了具有代表性的实验线路,进行了机构仿真研究,设计了三臂中分式机器人机构,控制器实现了基于规则库的自动控制与基于视觉的远程主从控制的混合控制,本体与地面基站之间的图像和控制命令的可靠传输,视觉导航控制能准确识别出防震垂、悬垂线夹、直线线夹、左拐弯线夹、右拐弯线夹等障碍,实现了基于视...
探讨了基于分布式专家系统的超高压输电线路巡检机器人控制系统,给出了一种利用CLIPS和C、VC++混合编程构成分布式专家系统作为机器人控制器的方法,并且提出了一种基于规则和证据的可信度(CF)的分布式专家系统的协调算法.经过试验论证,该控制方法能很好地实现超高压输电线路巡检机器人的作业功能.