
搜索结果: 106-120 共查到“机器人控制”相关记录4695条 . 查询时间(5.879 秒)

2023世界机器人大赛锦标赛(郑州)在航空港新区成功举办(图)
机器人 锦标赛 郑州 航空港新区
2023/11/4
科技盛会、创新引领。2023年10月27日-29日,2023世界机器人大赛锦标赛(郑州)在河南省郑州航空港综合经济试验区中原国际会展中心成功举办,共有5000余名来自全国各地的精英赛手同场竞技。本届大赛由中国电子学会和郑州航空港经济综合实验区主办,河南省电子学会和郑州甲方乙方展览策划有限公司联合承办。

2023年10月22日下午,由中国科学技术大学教务处、校团委、学生工作部(处)、党委宣传部、保卫与校园管理处联合主办,工程科学学院承办,工程科学实验教学中心和学生机器人俱乐部协办的中国科学技术大学第二十三届RoboGame机器人大赛决赛在中校区体育中心综合馆举行。
PLVO: 基于平面和直线融合的RGB-D视觉里程计
RGB-D视觉里程计 平面− 直线融合 机器人定位 自适应融合 多特征联合关联
2024/1/16
针对利用平面特征计算RGB-D相机位姿时的求解退化问题,提出平面和直线融合的RGB-D视觉里程计(Plane-line-based RGB-D visual odometry,PLVO).首先,提出基于平面−直线混合关联图(Plane-line hybrid association graph,PLHAG)的多特征关联方法,充分考虑平面和平面、平面和直线之间的几何关系,对平面和直线两类...
中国科学院深圳先进技术研究院专利: 柔性表面爬行机器人
中国科学院深圳先进技术研究院 专利 柔性 表面爬行 机器人
2023/10/17
中国科学院深圳先进技术研究院专利: 柔性表面爬行机器人

苏州大学机电工程学院在2023年中国机器人及人工智能大赛中再创佳绩(图)
机器人 人工智能 CRAIC
2024/2/3
近日,第二十五届中国机器人及人工智能大赛获奖名单揭晓。苏州大学机电工程学院斩获全国一等奖6项、二等奖3项、三等奖2项和省级一等奖4项、二等奖3项,再创佳绩!
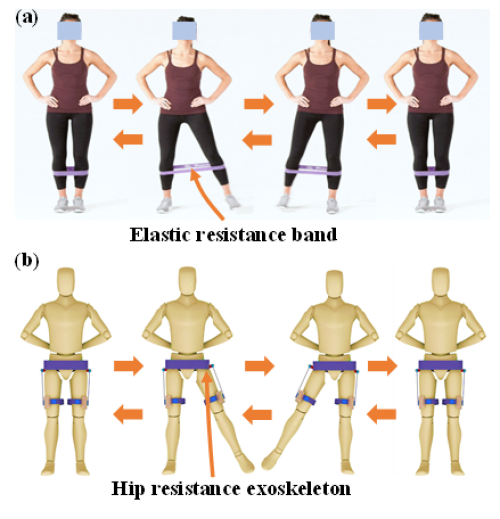
中国科学院深圳先进技术研究院等研发出首款抗阻横向行走锻炼外骨骼(图)
抗阻 横向行走 锻炼 外骨骼
2023/10/16
近日,中国科学院深圳先进技术研究院集成所智能仿生中心副研究员曹武警与香港中文大学、上海交通大学、东北大学合作,在外骨骼机器人领域取得新进展。该团队研发了国际首款面向横向行走步态的外骨骼,通过在横向行走时施加主动阻力力矩代替弹力带被动力矩,实现髋关节外展肌肉的精准高效锻炼,为抗阻横向行走锻炼提供了智能化新方法。相关研究成果以Development and Evaluation of a Hip Ex...
英国开发出触觉增强型机器人
英国 触觉增强型 机器人
2024/1/15
英国伦敦玛丽女王大学科研人员在《IEEE机器人与自动化快报》上发表研究成果,介绍了一种名为L3F-TOUCH的传感器,可增强机器人的触觉感知能力。
中国科学院深圳先进技术研究院专利:一种X射线成像机器人及其机械臂
中国科学院深圳先进技术研究院 专利 X射线成像 机器人 机械臂
2023/9/28
中国科学院深圳先进技术研究院专利:一种X射线成像机器人及其机械臂

中国水产科学研究院渔业机械仪器研究所携科技成果亮相全国智慧农业现场推进会(图)
科技成果 智慧农业 渔业机械仪器
2023/12/19
2023年9月24至25日,中国水产科学研究院渔业机械仪器研究所作为上海代表团成员参加了2023年全国智慧农业现场推进会,在智慧渔业展区展示了最新科技成果“渔用水下爬壁清洗机器人”。
中国科学院深圳先进技术研究院专利:主动式蛇形内窥镜机器人系统
中国科学院深圳先进技术研究院 专利 主动式 蛇形内窥镜 机器人系统
2023/9/27
中国科学院深圳先进技术研究院专利:主动式蛇形内窥镜机器人系统
基于外环速度补偿的封闭机器人确定学习控制
确定学习 速度补偿控制 神经网络 封闭机器人
2024/1/16
针对未开放力矩控制接口的一类封闭机器人系统,提出一种基于外环速度补偿的确定学习控制方案.该控制方案考虑机器人受到未知动力学影响,且具有未知内环比例积分(Proportional-integral,PI)速度控制器.首先,利用宽度径向基函数(Radial basis function,RBF)神经网络对封闭机器人的内部未知动态进行逼近,设计外环自适应神经网络速度控制指令.在实现封闭机器人稳定控制的基...
中国科学院合肥物质科学研究院专利:一种基于嵌入式控制器的机器人控制方法和装置
中国科学院合肥物质科学研究院专利:一种机器人的控制方法以及装置与系统
中国科学院合肥物质科学研究院专利:用于高层建筑的消防机器人
中国科学院合肥物质科学研究院 专利 高层建筑 消防机器人
2023/9/25
中国科学院合肥物质科学研究院专利:用于高层建筑的消防机器人
中国科学院合肥物质科学研究院专利:基于双电磁离合器的二自由度机器人关节