
搜索结果: 136-150 共查到“机器人控制”相关记录4695条 . 查询时间(2.623 秒)
中国科学院合肥物质科学研究院专利:一种全自动液体撞击式生物采样机器人系统
近日,上海科技大学信息学院自动化与机器人中心(以下简称STAR 中心)在视觉感知、机器人操控、视觉实时定位与建图(SLAM)等领域取得多项研究成果,相关论文被2023 IEEE/RSJ International Conference on Intelligent Robots and Systems(以下简称:IROS 2023)接收。
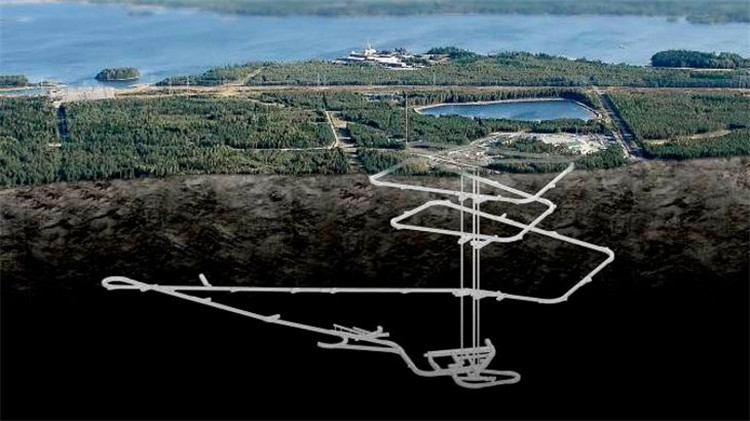
瑞士企业在芬兰乏燃料贮存设施测试新型机器人(图)
瑞士企业 芬兰 乏燃料贮存 新型机器人
2024/1/10
2023年6月,瑞士机器人公司ANYbotics牵头的一个研究小组到访芬兰奥尔基洛托(Olkiluoto)核电厂,以测试其ANYmal机器人在地下设施中的性能。这款四足机器人专为严峻工况下的自主运行而设计,已在奥尔基洛托附近的翁卡洛(Onkalo)地下乏燃料贮存设施的隧道中进行测试。

浙江大学控制科学与工程学院博士生导师郭秀珍研究员(图)
浙江大学控制科学与工程学院 博士生导师 郭秀珍 研究员 机器人
2024/1/5
郭秀珍,浙江大学控制科学与工程学院百人计划研究员、博士生导师。研究方向:工业智能与优化控制;智能检测与感知;工业控制系统安全;机器人与智能无人系统。研究主题:物联网;无缘感知网络;无线感知;移动计算。
中国科学院合肥物质科学研究院专利:一种直线电机驱动的贴片机
中国科学院合肥物质科学研究院专利:基于直行路口检测的移动机器人航迹推算修正系统及方法
中国科学院深圳先进技术研究院专利:一种立式移动穿刺机器人
中国科学院深圳先进技术研究院 专利 立式 移动穿刺 机器人
2023/8/31
中国科学院深圳先进技术研究院专利:一种立式移动穿刺机器人

2023世界机器人大赛―BCI脑控机器人大赛圆满闭幕(图)
机器人大赛 BCI 脑控机器人 脑机接口
2023/11/4
2023年8月16日至22日,“2023世界机器人大赛―BCI脑控机器人大赛”在北京圆满落下帷幕。本次大赛设技能赛、技术赛、青年论文答辩和创新成果展示四部分组成,共吸引了来自全国的2000余人共同参赛。

智能机器人技术前沿论坛在合肥举办(图)
智能机器人 前沿论坛 合肥
2023/12/19
2023年8月25日上午,由中国人工智能学会指导,中国科学院合肥物质科学研究院、中国人工智能学会智能机器人专委会主办,合肥研究院智能机械研究所等单位承办的智能机器人技术前沿论坛在科学岛举行。国内专家学者、相关重大项目及课题负责人、青年科学家等70余人参会,围绕“先进机器人与人工智能”主题开展学术交流。

2023年8月13日,第二十二届全国大学生机器人大赛 RoboMaster 2023机甲大师超级对抗赛全国总决赛(以下简称机甲大师赛)在深圳“春茧”体育馆正式落下帷幕。经过激烈赛程对抗,华南理工大学华南虎战队最终斩获全国季军。
双腿轮机器人由于内在不稳定性以及强耦合非线性特性,其运动控制尤其是高动态运动控制非常困难.为此,提出基于最优力分配的全身力矩控制框架,可同时实现双腿轮机器人的自平衡与躯干位姿控制;为提高双腿轮机器人在高速运动时跨越垂直障碍物的能力,提出应对垂直障碍的跳跃动作规划方法,并基于全身力矩控制框架进行控制与实现;通过分析简化的轮式倒立摆模型,得到腾空时飞轮转动对俯仰姿态的动力学影响,实现腾空阶段俯仰姿态的...
基于渐进无迹卡尔曼滤波网络的人体肢体运动估计
卡尔曼滤波网络 人体肢体运动估计 表面肌电信号 渐进无迹卡尔曼滤波
2024/1/16
针对基于表面肌电信号(Surface electromyography,sEMG)的人体肢体运动估计建模困难的问题,提出一种渐进无迹卡尔曼滤波网络(Progressive unscented Kalman filter network,PUKF-net),来实现降低肢体运动与sEMG量测的建模难度以及提高肢体运动估计精度的目的.首先,设计深度神经网络从sEMG数据中学习肢体运动状态与sEMG量测之...