
搜索结果: 76-90 共查到“知识库 航空、航天科学技术”相关记录11607条 . 查询时间(6.61 秒)
基于KnCMPSO算法的异构无人机协同多任务分配
无人机多任务分配 多目标优化 粒子群算法 协同进化
2024/1/17
随着无人机(Unmanned aerial vehicle,UAV)技术的广泛应用和执行任务的日益复杂,无人机多机协同控制面临着新的挑战.以无人机总飞行距离和任务完成时间为优化目标,同时考虑异构无人机类型、任务执行时序等多种实际约束,构建基于多种约束条件的异构无人机协同多任务分配模型.该模型不仅包含混合变量,同时还存在多个复杂的约束条件,因此,传统的多目标优化算法并不能有效地处理混合变量及对问题空...
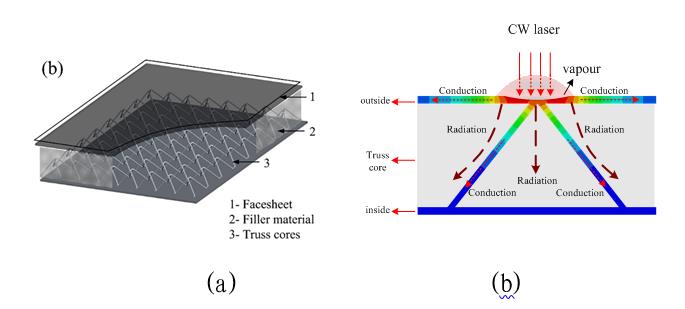
抗激光加固已经成为高速飞行器结构设计必须考虑的重要环节。目前常见的抗激光加固技术主要包括反射涂层、高导热材料、烧蚀材料和拖延传热技术。虽然现有的抗激光加固技术可以在一定程度上延缓激光破坏时间,但是由于工艺复杂、功能单一、结构效率低、力学性能差,在实际应用中仍存在一定的局限性。
分布式电源系统相比集中式电源系统具有高冗余度、灵活度和可靠度的优势,逐渐成为航天电源系统的研究重点之一。从分布式电源系统结构出发,采用模块化设计手段,对系统的核心部件通用电源模块进行设计,并对基于APR模块和双向BCDR模块的分布式电源系统进行工作模式分析与控制策略设计,最后通过实验证明该控制策略的有效性,为航天器分布式电源系统设计与发展,提供了有益的借鉴。
航天器开关上电脉冲抑制方法研究
开关 上电脉冲 浪涌电流 浪涌抑制
2024/3/15
开关上电脉冲广泛存在于采用机械开关作为配电控制的宇航配电系统中。该脉冲尖峰产生时间要早于常规浪涌电流,脉冲峰值比稳态电流高几百倍,上升沿达ns数量级,对配电系统危害巨大。通过剖析开关上电脉冲产生机理,对比了开关上电脉冲与常规浪涌电流的区别,分析了几种开关上电脉冲抑制方法的优劣,最终给出了一种最佳抑制方案。
基本概况:先进导航技术研究所依托属“精密仪器及机械”、“导航、制导与控制”两个二级学科,其中“精密仪器及机械”为江苏省重点学科和江苏省国家重点学科培育点,“导航、制导与控制”于2017年入选国防科工局国防特色学科。
问天实验舱里的沈自所智慧――科学实验柜主结构
实验柜 空间站建设 载人航天
2022/9/6
问天实验舱部署的生命生态实验柜、生物技术实验柜、科学手套箱与低温存储柜和变重力科学实验柜的主结构均由中国科学院沈阳自动化所承研。这是2021年天和核心舱发射入轨以来,沈阳自动化所继续为中国空间站建设提供重要装备。
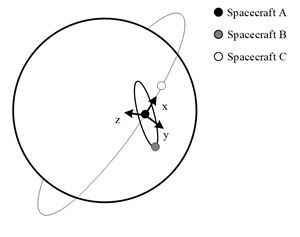
国内外相关研究表明,仅利用相对测量信息即可实现编队航天器的自主导航。其中,航天器间的相对距离信息可通过微波测距或激光测距仪测量得到,相对视线(LOS)信息可通过光学相机测量得到。利用星敏感器提供的惯性基准,将相对位置矢量转换到惯性坐标系,通过对一段时间内的相对位置矢量进行连续测量,即可确定所有成员航天器的绝对轨道要素。这种方法需要将测量信息输入到序贯滤波器中,从而实现自主导航,因此需要一定精度的航...
基于非线性干扰观测器的飞机全电刹车系统滑模控制设计
飞机防滑刹车系统 终端滑模控制 非线性干扰观测器 反馈线性化
2024/1/18
飞机防滑刹车具有典型的强非线性、强耦合和参数时变等特点,并且跑道环境的干扰容易对飞机的地面滑跑性能造成不利影响.本文提出了一种基于非线性干扰观测器的飞机全电防滑刹车系统滑模控制设计方法.首先,考虑了实际刹车不确定性干扰条件下的防滑刹车动力学建模问题,通过对高阶非线性刹车系统进行反馈线性化处理,简化了基于严格反馈的模型.其次,基于对主轮打滑原因的深入分析,设计了非线性干扰观测器对干扰进行在线估计,并...

哈尔滨工业大学交通科学与工程学院科研成果机场飞行导航监视管理系统。
二自由度无人直升机的非线性自抗扰姿态控制
二自由度无人直升机 姿态控制 自抗扰控制 扩张状态观测器
2024/1/22
无人机高性能姿态控制的难题之一是无人机系统模型通常无法精确建立且受到复杂外部干扰的作用.针对这一难题,本文提出了二自由度无人直升机姿态控制的非线性自抗扰控制设计方法.该方法的主要思想是将系统内部的未建模动态和外部干扰等不确定性因素作为“总扰动”,利用输入输出信息在线观测,并在反馈控制环节对其进行补偿.本文发展了非线性扩张状态观测器与非线性反馈控制律用以提高控制品质。
针对基于旋翼无人机的近地面空间应急物联网在缺少地面基站和能量受限的情况下,可靠节能地远距离传输重点区域全信息的要求,研究由无人机组成的移动Ad-Hoc网络的远距离通信问题,提出近地面空间应急物联网空地节点动态协同部署方法.首先,对该类物联网进行系统建模;其次,根据所建模型中无人机编队大范围、队列化、微漂移地分散于监测区域的特点和编队的联合分布情况,在提供可靠通信的同时,将系统通信能耗和移动能耗的计...
提出了基于有向图的航天器姿态协同控制算法,并且系统的角速度和控制输入满足有界性的约束.当外部扰动存在时,设计了自适应算法估计扰动的上界,采用滤波器补偿的方法处理控制输入饱和问题,并且设计了新的自适应姿态协同控制算法.对于所设计的控制算法,给出了稳定性分析,证明了系统具有几乎全局渐近稳定性.进一步把控制算法推广到时变通信时滞情况,当控制器参数满足一定条件时,仍然能够保证编队系统的几乎全局渐近稳定性....

电动无杆飞机牵引车(图)
电动无杆飞机牵引车 电池 电驱动
2022/5/21
电动无杆飞机牵引车为张军副教授与西安睿诺航空装备有限公司联合开发,系统以电池为系统动力,具有电液混动功能,液压动作实现飞机的抱轮、提升动作,电驱动实现牵引车的行驶和转向,可实现10t飞机的牵引要求。

给飞机装上智慧“大脑”(图)
飞机 飞机飞行 机载设备
2021/3/11
今天,飞机已成为重要的交通工具。为了更好地控制飞机飞行,工程师在飞机上安装了各种装置。如航空仪表、无线电台、控制系统、导航系统等,人们统一称之为机载设备。20世纪70年代前,飞机机载设备都是机械式的,各自独立发挥作用。随着大规模集成电路的发展,计算机的体积越来越小,运算速度越来越快,工程师开始将计算机安装在飞机上,以便更好地控制各个系统高效工作。