
ЫбЫїНсЙћ: 1-15 ЙВВщЕНЁАжЊЪЖПт ПижЦПЦбЇгыММЪѕ ЯЕЭГЁБЯрЙиМЧТМ1954Ьѕ . ВщбЏЪБМф(1.437 Уы)
ИпЮТИпИКдиЛЗОГЯТЩеНсЛњГЕТждкЯпжЧФмШѓЛЌЛњЦїШЫЯЕЭГЃЈЭМЃЉ
ИпЮТ ИпИКди ЩеНсЛњГЕТж жЧФм ШѓЛЌ ЛњЦїШЫЯЕЭГ
2024/10/29
КЫаФММЪѕЃКДњЬцШЫЙЄдкЖёСгЛЗОГжажмЦкадзджїМгзЂШѓЛЌжЌЃЌгЕгаГЕТжВтЫйМАИњЫцЖЈЮЛЯЕЭГЁЂГЕТжЮЛзЫМьВтЯЕЭГЁЂЛњЦїШЫЯЕЭГЁЂЖрздгЩЖШШсадМггЭЧЙЯЕЭГЁЂЦјдДМАгЭЗЇЯЕЭГвдМАаЭЌПижЦЯЕЭГЕШЗЂУїзЈРћЁЃ

здЖЏМнЪЛММЪѕПЩвдДѓДѓЬсИпНЛЭЈаЇТЪЃЌЪЙГіааИќМгБуНнЁЂАВШЋЃЌЭЌЪБвВгажњгкЛКНтГЧЪаНЛЭЈбЙСІЁЃЁЖББОЉЪаздЖЏМнЪЛГЕСОЕРТЗВтЪдБЈИцЁЗЯдЪОЃЌББОЉЪаздЖЏМнЪЛПЊЗХВтЪдЕРТЗ200Ьѕ69958ЙЋРяЃЌАВШЋВтЪдРяГЬЭЛЦЦ268ЭђЙЋРяЁЃжЧФмМнЪЛе§дкж№ВНИФБфЮвУЧЕФГіааЗНЪНЁЃБОЗНЗЈгыЯЕЭГОпгаСМКУЕФЪЕЪЉадФмЃЌдкФмСПЯћКФгыМнЪЛПижЦЙ§ГЬжаеЙЯжГіСЫгааЇЕФадФмКЭПижЦаЇЙћЁЃгыДЋЭГЕФЪБМфПижЦЗНЗЈЯрБШЃЌФмЙЛДѓСПЕФНкдМПижЦГЩБОЃЌЭЌЪБТњзуздЖЏМнЪЛИњзй...

ХчИЫздЦНКтПижЦЯЕЭГЃЈЭМЃЉ
ХчИЫ здЦНКт ПижЦЯЕЭГ
2024/9/4
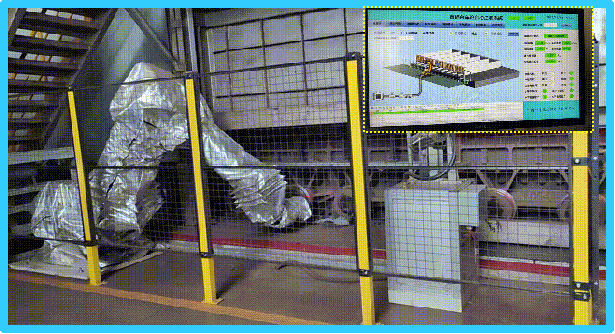
ИУГЩЙћеыЖдХчИЫХчЮэЛњздЖЏЛЏГЬЖШЕЭЁЂECUПижЦЦїГЄЦквРРЕНјПкЕШЮЪЬтЃЌМЏГЩЬяМфЙЄПіЪвФкФЃФтЁЂАыЪЕЮяЗТецЁЂгВМўдкЛЗВтЪдЕШЙиМќММЪѕЃЌбажЦСЫХчИЫзЫЬЌМьВтЁЂздЦНКтжЧФмПижЦЦїЃЌЪЕЯжСЫЙњВњХчЮэЛњзївЕжЧФмЛЏЁЂОЋЯИЛЏПижЦЁЃ

ИУжжЗЪБфСПВЅЪЉЯЕЭГЮЊЁАЪЎЫФЮхЁБЙњМвжиЕубаЗЂМЦЛЎбаОПГЩЙћЃЌЯЕЭГМЏГЩGNSSЮРаЧЕМКНБЈЮФаХЯЂНгЪегыНтЮіЁЂЪ§зжДІЗНЭМЖСШЁгыВщбЏЁЂжжЗЪЧ§ЖЏЕчЛњПижЦгыМрПиЁЂЯЕЭГЙЪеЯМьВтгыБЈОЏЕШЙІФмгквЛЬхЃЌЪЕЯжвРОнХЉбЇЪ§зжДІЗНОЋзМЪЕЪЉБфСПВЅжжЪЉЗЪзївЕЃЌИФБфСЫДЋЭГВЅжжЪЉЗЪДѓУцЛ§ЁЂОљвЛЛЏЕФЭЖШыЗНЪНЃЌМѕаЁСЫЖдЛЗОГКЭЭСШРжЪСПЕФВЛРћгАЯьЃЌЬсИпСЫВЅжжЪЉЗЪаЇТЪКЭОМУаЇвцЁЃ
еыЖдОпгаЮДжЊЖЏЬЌКЭMИіЦНКтЕуЕФСЌајЪБМфЗЧЯпадЯЕЭГ,НЋЯпадздЪЪгІзюгХЧаЛЛПижЦЦїКЭЮДНЈФЃЖЏЬЌВЙГЅЦїЯрНсКЯ,ЛљгкЧЖШызЊЛЛММЪѕКЭНќЫЦЖЏЬЌЙцЛЎЫМЯы,ЬсГівЛжжздЪЪгІзюгХЧаЛЛПижЦЗНЗЈ.ЪзЯШдкЗЧЯпадЯЕЭГЕФMИіЦНКтЕуНЈСЂMИіЯпадЛЏФЃаЭ,ЕБФЃаЭВЮЪ§вбжЊЪБ,ЬсГігЩЯпадзюгХЧаЛЛПижЦЦїЁЂЧаЛЛзМдђЁЂЮДНЈФЃЖЏЬЌВЙГЅЦївдМАЗЧЯпадЯЕЭГзщГЩЕФПижЦЯЕЭГНсЙЙЁЃ
еыЖдвЛРрЗЧЦЅХфВЛШЗЖЈЖрЪфШыЖрЪфГі(Multi-input multi-output,MIMO)ЯЕЭГЬсГівЛжжЗжЪ§НзжеЖЫЛЌФЃПижЦ(Fractional-order terminal sliding-mode,FOTSM)ВпТд,ЪЙЯЕЭГЪфГіЪеСВЕНСуЖјЗЧЦфСкгђ.ИУЗНЗЈНтГ§ДЋЭГЗДВНЗЈПижЦТЩЩшМЦжа,ащФтПижЦдівцгвЮБФцОиеѓБиаыДцдкЕФбЯПСЯожЦ;ЖдЯЕЭГВЛШЗЖЈадЕФМйЩшВЛОжЯогкТ§ЪББфКЭH2ЗЖЪ§гаНчаЭШХЖЏ,ЗжЮіПижЦдівцДцдк...
еыЖдИДдгЙЄвЕЯЕЭГЖдадФмЫЅЭЫЕФШнШЬЖШЕЭЕШЮЪЬт,ЬсГіЛљгкЯЕЭГадФмдЄВтЕФвЛРрЗДРЁПижЦЯЕЭГЙ§ГЬМрВтЗНЗЈ,ЭЈЙ§РшТќЖШСПЖдПижЦадФмЫЅЭЫГЬЖШНјаадЄВтгыМрВт,ВЂИјГіЗЂЩњЙЪеЯЕФРраЭ,вдЬсЩ§Й§ГЬМрВтЯЕЭГЕФЪЕЪБадгызМШЗад.ЪзЯШ,РћгУЯЕЭГЕФЪЕЪБЪ§Он,МЦЫуЯЕЭГадФмЫЅЭЫЕФдЄВтжИБъ;ЦфДЮ,РћгУРшТќЖШСПЖдЯЕЭГадФмЫЅЭЫГЬЖШНјаадЄВтгыМрВт,ВЂРћгУЫцЛњЫуЗЈИјГіЖдгІЕФуажЕРДеяЖЯЯЕЭГадФмЫЅЭЫ;зюКѓ,ЭЈЙ§МЦЫуИїРрв§ЗЂЯЕЭГадФмЫЅЭЫЕФЙЪеЯЕФадФм...
ЮоШЫжБЩ§ЛњЪфЕчЯпТЗздЖЏбВМьгыМмЩшЯЕЭГЁЃ
зджїЫЎЯТЛњЦїШЫзЈгУБЃеЯЯЕЭГ
зджї ЫЎЯТЛњЦїШЫ зЈгУБЃеЯЯЕЭГ
2023/8/18
зджїЫЎЯТЛњЦїШЫзЈгУБЃеЯЯЕЭГЁЃ
жаЙњПЦбЇдКздЖЏЛЏбаОПЫљИДдгЯЕЭГЙмРэгыПижЦЙњМвжиЕуЪЕбщЪв2021ФъЯЕСаНВзљЃЈЭМЃЉ
жаЙњПЦбЇдК ИДдгЯЕЭГ ЙмРэПижЦ ЯЕСаНВзљ 2021Фъ
2023/5/22
жаЙњПЦбЇдКздЖЏЛЏбаОПЫљИДдгЯЕЭГЙмРэгыПижЦЙњМвжиЕуЪЕбщЪв2021ФъЯЕСаНВзљЁЃ

жаЙњПЦбЇдКздЖЏЛЏбаОПЫљИДдгЯЕЭГЙмРэгыПижЦЙњМвжиЕуЪЕбщЪв2022ФъЯЕСаНВзљЃЈЭМЃЉ
жаЙњПЦбЇдК ИДдгЯЕЭГ ЙмРэПижЦ ЯЕСаНВзљ 2022Фъ
2023/5/22
жаЙњПЦбЇдКздЖЏЛЏбаОПЫљИДдгЯЕЭГЙмРэгыПижЦЙњМвжиЕуЪЕбщЪв2022ФъЯЕСаНВзљЁЃ
ащФтЗТецНЬбЇвЛСїПЮГЬЁЖЛљгкдЦЪЕбщЯЕЭГЕФ8086ЮЂЛњЯЕЭГЗТецЪЕбщЁЗьЏЙњЛЊЁЃ
жаЙњбаОПЩњНЬг§ХХааАё-Ьѕ
- е§дкМгди...
жаЙњбЇЪѕЦкПЏХХааАё-Ьѕ
- е§дкМгди...
ЪРНчДѓбЇПЦбаЛњЙЙХХааАё-Ьѕ
- е§дкМгди...
жаЙњДѓбЇХХааАё-Ьѕ
- е§дкМгди...
ШЫЁЁЮя-ЦЊ
- е§дкМгди...
ПЮЁЁМў-ЦЊ
- е§дкМгди...
ЪгЬ§зЪСЯ-ЦЊ
- е§дкМгди...
баеазЪСЯ -ЦЊ
- е§дкМгди...
жЊЪЖвЊЮХ-ЦЊ
- е§дкМгди...
ЙњМЪЖЏЬЌ-ЦЊ
- е§дкМгди...
ЛсвщжааФ-ЦЊ
- е§дкМгди...
бЇЪѕжИФЯ-ЦЊ
- е§дкМгди...
бЇЪѕеОЕу-ЦЊ
- е§дкМгди...