
�������: 31-45 ���鵽��֪ʶ�� �������ṹ���������ؼ�¼1208�� . ��ѯʱ��(5.148 ��)
�����������ܲ��������ڵ���ˮ�ġ�������������Ŀ�ѧӦ�á�
ȫ��ʱ���ظ�Ƶ�����Ǽ�����ϵͳ�ؼ�������Ӧ�á�
�����Ǻ������ڿռ价����������ɸ�������Ĺؼ�����.�����������й��ռ���Ƽ�����ȥ50�������ķ�չ�ɹ�,�ܽỮ��Ϊ��������̬���ơ���̬������ơ�����֪−����−ִ�С�(Perception-decision-action,PDA)����������������,���������˸�������Ҫ��չ�Ļ�����,Χ�Ƴ���ṹ��������̬������ơ�����ռ䲩�Ŀ��ơ����绯��������Ⱥ���ơ�����̽����������ϵͳ����...
��Ժ���������������������ٺ�����λ�˿���ϵͳִ������������,�����һ��ֱ������Ӧ�ݴ����Ʒ���,��֤���ٺ������ڷ���ִ���������µ������ȶ��ԺͶ�Ŀ�꺽����λ��״̬�Ľ�����������.���ڶ�ż��Ԫ���ĺ�����λ��һ�廯����ϵͳģ��,����,���������֪,��Ʊ�ƿ����ź�;Ȼ��,�������Ӧ�����ɶԱ�ƿ����ź��е�δ֪�������й���,��������Ӧ�����ź�;���,���ö�Lyapunov�����Զ����ģʽ�µ�ϵͳ����...
�ֲ�ʽ��Դϵͳ��ȼ���ʽ��Դϵͳ���и�����ȡ����ȺͿɿ��ȵ����ƣ���Ϊ�����Դϵͳ���о��ص�֮һ���ӷֲ�ʽ��Դϵͳ�ṹ����������ģ�黯����ֶΣ���ϵͳ�ĺ��IJ���ͨ�õ�Դģ�������ƣ����Ի���APRģ���˫��BCDRģ��ķֲ�ʽ��Դϵͳ���й���ģʽ��������Ʋ�����ƣ����ͨ��ʵ��֤���ÿ��Ʋ��Ե���Ч�ԣ�Ϊ�������ֲ�ʽ��Դϵͳ����뷢չ���ṩ������Ľ����
�����������ϵ��������Ʒ����о�
���� �ϵ����� ��ӿ���� ��ӿ����
2024/3/15
�����ϵ�����㷺�����ڲ��û�е������Ϊ�����Ƶ�����ϵͳ�С������������ʱ��Ҫ���ڳ�����ӿ�����������ֵ����̬�������ٱ��������ش�ns�������������ϵͳΣ����ͨ�����������ϵ���������������Ա��˿����ϵ������볣����ӿ���������𣬷����˼��ֿ����ϵ��������Ʒ��������ӣ����ո�����һ��������Ʒ�����
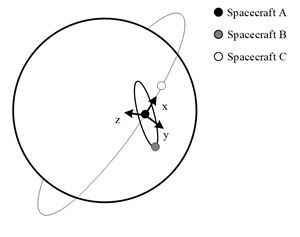
�й���ѧԺ���ҿռ��ѧ���Ŀ�����Ա���һ�ֽ��������λ��ʸ���۲����ݵı�Ӻ�����������λ������ͼ��
���λ�� ʸ���۲����� ��Ӻ����� ������λ
2023/2/17
����������о���������������Բ�����Ϣ����ʵ�ֱ�Ӻ��������������������У������������Ծ�����Ϣ��ͨ�����������Dz����õ����������(LOS)��Ϣ��ͨ����ѧ��������õ����������������ṩ�Ĺ��Ի��������λ��ʸ��ת������������ϵ��ͨ����һ��ʱ���ڵ����λ��ʸ��������������������ȷ�����г�Ա�������ľ��Թ��Ҫ�ء����ַ�����Ҫ��������Ϣ���뵽����˲����У��Ӷ�ʵ�����������������Ҫһ�����ȵĺ�...
��ƵSAR��Ϊһ��������ң�����ƣ������ڶ��ȵ�����̬Ŀ��ij������ӡ����һ�ֻ��ڴ�ǶȾ���ģʽ����ƵSARʵ�ַ�����������ƵSAR�ز����ݷָ�����Լ���������SAR������Ƶ����ģʽ����̬�������ԣ���ͨ��ƫ������ʵ�ֲ�ͬ��Ƶ֡�������������ת���ƣ����ո�������������̬����̬���ٶȡ�ͨ����ѧ������֤������̬�������Ե���Ч�ԡ�
�����һ�����Ӳ�Ʒ�ܼ��͵ķɻ�����ϵͳ�ṹ��ʧЧ�������ӡ�ʧЧģʽ��������ͳ�ķ������Զ��������Ч������������״���������˻��ں��������ھ�ķɻ�PHM�о������ȴ�ϵͳ�ṹ�����ۻ�����������Դ��洢��ʽ�ȽǶȷ�������һ���ɻ��Ժ��������ھ��Ӧ��������������˻��ں��������ھ�Ĺؼ��������������ݵ�Ԥ���������ɹ��������ࡢ���ࡢ������Ԥ��ȣ���������һ�ֻ���˽���Ƶķɻ�PHM���������ھ�ƽ̨����ϸ...
���ڸ߿ռ�ֱ�������Ӱ����½���������������������
�½� �߿ռ�ֱ��� ����Ӱ�� �������� ������� ���� �� ����
2019/4/16
�����������½���������������������ø߿ռ�ֱ���ң��Ӱ����������ʶ��,���ӿ��١�ȷ�ػ�ȡ������������ֲ�������ֲ�����,��������ز������ߵ��ƶ���ũ����ľ�ȷ�������������� �������½�����������Ҫũ����Ϊ�о�����,���û�����������������ң��Ӱ������,ͨ���ȽϹ�����ͼ��SAM����֧����������SVM����CART��������DTs�������ɭ�֣�RF����4�ֻ���ѧϰ�㷨�ڸ߿ռ�ֱ�������Ӱ��...
�����������ĺ�������ȫ�ӽ��˹���Ͽ���
��������ȫ�ӽ� �˹���Ͽ��� �������� ������ײ ��ȫԼ������ ��ģ����
2019/3/15
��Դ����ⲿ�Ŷ����������ĺ�������ȫ�ӽ�������, ���Ŷ��Ͻ�δ֪ʱ, ���ڻ��ֻ�ģ������������˿� ���͵�����ʱ������Ӧ�˹���Ͽ�����. ����������ƹ����в��������͵ı������������ٺ������˶���������� ֤�ӽ������к������İ�ȫ��, ͬʱͨ������ϵͳ������Ӧ�㷨�ֱ��������������Ŷ��Ͻ�δ֪. ����������ŵ�� ����֤�����ڿ�������������ϵͳ״̬������ʱ��������, ���ܹ���֤�ٺ�������ʵ�ֺ�...
��Ժ�����������������ⲿ���ź����뱥�͵����, ���������һ������������ٿ�����. �����ò����õ������λ����Ϣ, �����һ����ģ�۲�������������Խ��ٶ�, �����ݸù���ֵ�����һ��³������������. ͨ������һ������ϵͳ, �����뱥����������˷���. ����Lyapunov �ȶ�������, ֤���˱�������ĸÿ������ܹ���֤λ�ú��ٶȸ�������һ���н���. ���ͨ����ֵ������֤������Ƶ��������������...
���÷���·���滮�ĺ��������̰�ȫ����Խ�
����·���滮 ����Խ� �����Կ��� SOS�Ż� �����Թ滮 ���Զ����͵�������(LQR�CTrees)
2019/3/15
�����������뽻��Խӹ�������Ҫ���������, �Խ����ȵ�Լ��, ������к���������������ٵķ���. ���� �о���һ�ֻ������Զ����͵�������(linear quadratic regulator trees, LQR�CTrees)����·���滮�İ�ȫ����Խӵ�·�� �滮����Ʒ���. ���Ȳ��÷����Թ滮�㷨(nonlinear programming, NLP)���㿪����ƹ켣, ��Ӧ�þֲ����Է����� ��...
��Կռ�۲���δ֪Ŀ�꺽������Ŀ�������, ���������һ���·���. ���ڶ����Ĺ��Ʒ����͵�����С���� �㷨���߹������ʽ�������Ĺ��Բ���, ��ͨ��һ�ֻ��ڱ����ַ�����ֱ�Ӳ����������������̬����ϵͳ, �˷��� �����������IJ�����˫��������. ���ǵ������������ú����þ���IJ������, ����˾��ж�����Ͷ������ʽ�㶯�� ³�����Ʒ��䷽��. ���, ��ֵ��������֤�����᷽������Ч��.
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...