
�������: 1-10 ���鵽�����������켼�� ���˻�����ؼ�¼10�� . ��ѯʱ��(0.198 ��)

2019��8��18����20�գ����߽�����������ʷ��д��������ϵͳ���껪����������ͨ�ú��ղ�ҵ���ؾ��С��й���ѧԺ�����Զ����о��������з��ġ����^100������ֱ����ϵͳӦ����չ��չʾ�˸������ָ��͵�����ҵʾ��Ӧ�ý��������չ���ڼ䣬�������г�����Ϊ���쵼����չλ�ιۣ������Զ��������������˿�������˼�������о�Ա��ϸ�����˿�����ķ�չս�ԡ��ٹ��V���˻����ּ����˻�ϵͳ�����п��ƵȺ��ļ��������ԡ�...

2017��11��17-18�գ�2017�й�����ѧ�����˻����ͷ������ֻ�ѧ��������Ͼ��ɹ��ٰ졣����������Ͼ����պ����ѧ���˻��о�Ժ����С�����˻��Ƚ��������Ų��ص�ʵ���ҡ�����ʡ���պ���ѧ�ᡢ�й�����ѧ���Ͼ�����վ�а죬����ʡ����ѧ��Э�졣���Թ��ڿ���Ժ�������ո�У����Ӫ��ҵ�������֯��53����λ��һ�ٶ��������μ�����ᡣ���������ʱ���죬������ᱨ�桢�ֻ���ȹ����ᡢ���������˻�ϵͳ��չ·��ͼ...
2016��1��15�գ����߽����˻����ͷ�����רҵ�ֻ�2015���������������˳���ٿ�������������ίԱ��λ������ҵ��ѧ���������о������졢�������պ����ѧ���˻������Ͼ����պ����ѧ���˻�����������ҵ�������15�ҵ�λ��ίԱ�����λᣬ�й�����ѧ�����¼渱���鳤��ӡ���֯�����������ܾ����Լ�������ҵ��ѧ��У���α�ά��ϯ�˱��λ��顣�α�ά��У������������ҵ��ѧ�Ի���ijɹ��ٿ���ʾף�أ�����ʾѧУ��һ���...

2015��8��23�գ����й��о���δ�����������´�����������ҵ��ѧ���С���Уѧ���ŶӲ�����Ʒ�������ϣ���������-����Эͬ������������ʵ�������ͷ�������ơ���66����Χ��Ʒ����ӱ�������ٻ�һ�Ƚ���
����ͨ�磨Agerpres�������������Э�ᣨARCA����վ��Ϣ��һ�ܱ�����Ϊ���������ơ���Air Strato���ĸ��������˻���ԭ�ͻ������Э���з���ɲ�������ԽΡ������˻������У����������ơ��������ͽϴ�ģ�������16����չ���ʺ���18����߿յ�ƽ������С����ɵ綯�����������õ�ؿ���7Сʱ��̫���ܵ�ؿ���3�졣���������ơ����غ�30����纽����Ӱ�ͼ����豸����ѧ������ִ������������...
��ӥ�����з����˻��ؼ�����
��ӥ���� ���˻� ң��ͼ����
2007/2/7
�й�����������2007��1��19��Ѷ�����գ���ӥ�����뺽��ƹ���̬���漼��������������˾ǩ�����˻�ң��ͼ����ϵͳ�Ƽ�������Ŀ��ͬ���ú�ͬǩ����ӥ�����з����Ľ�����̬���湫˾���к������о����˻�ң��ͼ�����Ĺؼ�����������ʵ�־�������궨��ͼ��Ԥ������ͼ���Զ�����ƴ�ӵȹ��ܵ����˻�ң��ͼ��������ϵͳ��
EADS�ƻ�2007���Է�������Ϣ���˻���ͼ��
EADS ��Ϣ ���˻�
2006/12/5
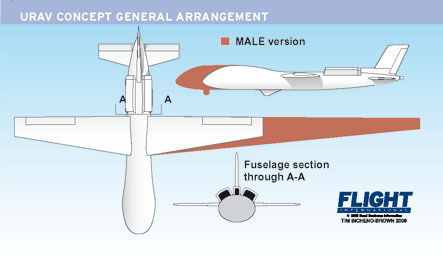
Ӣ�������й��ʡ�2006��11��21��Ѷ��ŷ���շ�����ռ伯�ţ�EADS���ľ��ú���ϵͳ�ֲ����ƻ���2007���Է�һ��������ϢUAV�����˻�����֤�������Ǹü������Ƶġ����㡱��Barracuda������ս������UCAV��/����������URAV����֤����2006��9��23����֮���ڸ߶�UAVƽ̨�����������һ�γ��ԡ�
������������С�����˻�
�������� ���˻� Ikramatic��˾
2006/8/31
Ӣ�������й��ʡ���վ2006��8��22�ձ�����������������ϵͳ������˾�ѽ�С�����˻�ȫ�ߴ�ԭ�ͻ�����ʾ��֤�Ƴټ����¡�����ϵͳ������˾��2005����Щʱ�����������ǹ�����ҵ���������Ǹ��ϲ��ϼ����о���CTRM����˾��Ikramatic��˾��ϵͳ��ѯ����SCS����˾���ʽ����ģ��ù�˾���㿪��CTRM��˾�ġ�ӥ��SR2���˻������������ս���鱨����
��������б�����˻� ����״̬��2������
���� ����С�۵� ��������ѧ �������������о��ƻ��� ŵ˹���ա���³����˾ ������ �ɻ�
2006/6/28
�»���2006��6��28�ձ��� �������������о��ƻ���DARPA����������ŵ˹���ա���³����˾б���������з���Ŀ�����ַ�����������Ϊ������С�۵�����Switchblade����һ�ֿɸı���ɨ��������Ի����ĽǶȣ������˻������кܸߵĵ��ٷ���Ч�ʣ���ִ������������������ִ�г����ٴ������
�����˵�ǰ�����̶�������������������С��������ʻ������(SUAV)����������ʻ������(MAV)�Ľ�չ��δ����չ�����漰�ļ������⡣�����˵���ŵ��������������,�����������ݺ�չ�ұȵ�Ӱ�졣�����������Ķ����ķǶ��������������Ժ�����������������Ŀǰ���ڵ�2����Ʒ���������ѧ��/��Ŀ���Ż���ƺ�̽��ʽ/����ʽ����Ʒ���,�Լ�����������������������ܿ��Ƶ���Ҫ�ԡ�
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...