
�������: 1-15 ���鵽������������ ��������ؼ�¼22�� . ��ѯʱ��(0.113 ��)
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժר����һ������������������������Ϣ��ⷽ��
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժ ר�� ���Դ��������� ������Ϣ���
2023/12/14
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժר����һ������������������������Ϣ��ⷽ��
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժר����������ά������������
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժ ר�� ������ά ������������
2023/12/13
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժר����������ά������������
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժר����һ����������������
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժ ר�� ̼��ά ���ϲ��� CFC����������
2023/12/13
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժר����һ����������������
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժר����������������������ά�����ؼ��궨װ��
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժ ר�� ���Դ��� ������ ��ά������ �궨װ��
2023/9/12
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժר����������������������ά�����ؼ��궨װ��
�û���������������Ӳ���Ƚ��������Ŷ�������ʽ����ѹ��������˼·��ͼ��
�й���ѧԺ�Զ����о��� ������ ��� ����
2022/6/22
����ѹ�����������������˻���������������ˡ�����ҽ�Ƶ���������������������Ҫ��Ա֮һ��Ȼ������������ѹ���������ڸ������ȡ����ȶ����Լ��ߴ��з�Χ�ȷ�����Ȼ���ڽϴ���ս�����������ڻ���������Ĺ㷺Ӧ�á��Զ������Ƚ��������Ŷӳ����о�Ա�Ƚ��ṹ�������ԭ�����������һ������ѹ��������˼·--���������ڵ��Ĺ��ʽѹ�����������ô������봫ͳ����ʽ��������ȣ��������ܹ�����Լһ����������

�����Ƚ�Ժ����������FBG����ԭ��������������-Ӧ������������֯���ͼ��
FBG����ԭ�� ���������� ������
2023/8/9
2022��1��7�գ��й���ѧԺ�����Ƚ������о�Ժҽ���������������о�Ա�Ŷӻ��ڲ������դ���˵Ĵ���ԭ������������Ӧ�á���������֯������о���ʵ���˻�����֯�ľ�����Ϣ����������Ϣ�Ķ�λ���ܡ���سɹ���Development of a Fiber Bragg Grating-based Force Sensor for Minimally Invasive Surgery �DCase St...

���գ��й���ѧԺ�Զ����о������ܻ�����ϵͳ�о����о�Ա��˶�Ŷ��ڻ����˶�ģʽ��������֪����ȡ�ý�չ���Ŷ���Ը߾��ȶ�ģʽ���������������˫Ŀ�Ӿ������������м���·�ߡ���GelStereoϵ�У��ƶ����������������м����ɲ�������ķ�չ�����о��ɹ�������IEEE Transactions on Industrial Electronics��

���������ƶ��������������ն˵Ŀ��ٷ�չ����̼������ܴ��м������˻��������˹����ܺͿɴ����豸�������ڵ�̽�����������豸�У����۵���ʾ�������Լ��ɵ�·����������豸�ȸ��ָ����Թ��ܲ�Ʒ�Ĵ���ӿ�֣�ʹ�����Ƕ���������������˸��ߵ�Ҫ������װ�õĿ����������ȡ���Ӧʱ�䡢��Я�ԡ�ʹ�������ԺͶ�ܼ����Ѿ���Ϊ��������������ʵ��Ӧ�������ǹ�ע���ȵ㡣

�廪��ѧ����ѧԺ���ΰ�����鷢����ƪ���������������ܲ����봩��ʽ�����������������о���չ��ͼ��
�廪��ѧ����ѧԺ ���ΰ������ ���ܲ��� ����ʽ����������
2017/3/20
2017��3��6�գ��廪��ѧ����ѧԺ���ΰ���ڵ��ڡ����Ͽ�ѧ�빤��R�����桷��Materials Science and Engineering R: Reports���Ϸ�������Ϊ������ʽ���������������ϡ����л������������ܡ�����Recent advances in wearable tactile sensors: Materials, sensing mechanisms, and devic...
Ϊ����ȷ��ʶ�غ����Բ��������һ�����ùؽ����غ�����������Ϣ����δ֪�غ����Բ�����ʶ�ķ������÷�������ţ��-ŷ�����̣����ù�һ����С��������������Ӧ�˲����Ӷ���ʶ��δ֪�غɵ����Բ�����ΪУ���㷨������MATLAB/Simulink��ADAMS�����δ֪�غ����Ա�ʶ����ƽ̨����ƽִ̨�л������������ɶȻ�е�ۺͶ�ָצĩ�˲���������е�۹ؽھ������ش��У�ĩ�˲�����ָצ�ڲ���д������������������...
ŷ�����з���ܼƻ���FP7���ṩȫ����������Ӣ����������ѧ��University of Birmingham���Ƽ���Ա�쵼��ŷ��ѧ��NANOBIOTOUCH�з��Ŷӣ����ڿ�չ���������������м�����������������ѧ�����о���ּ��ͨ���ӵ�����Ԫ�ṩʵ�����ݵĻ�����ѧϰ�㷨���������ִ�����������������Ӧ��ʵ�ֻ��������������м�����ͻ�Ƽ���������ָ������������ѧϰ��֪���ܡ�
���ݽӴ���ѧ���ۺ͵����ĵ���Ӧ���ϵ����һ�ֻ���ѹ����������ά�������������������еĴ��л������������̽������Ӧ�þ�����ⷨ�����������ڵ����������Ӧ�������Ĺ�ϵ�������˴��������б�����ά��������������������ģ�͡��Դ�Ϊ�����Դ���������������Խ����˷��棬�����ڷ������Դ������ṹ�����Ż�����������֤�˸ô������ṹ��Ƶĺ����ԡ�
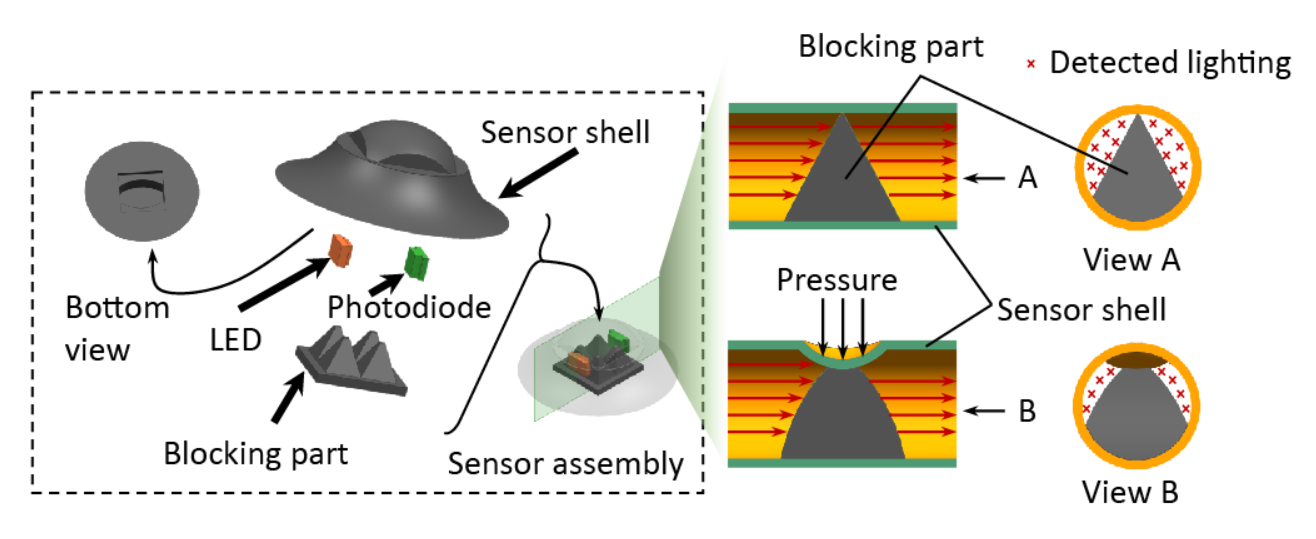
���Ŀǰ�����������о��в��ܼ��������ԺͶ�ά�����������⣬�����һ�ֻ������������ľ�����������ǶԳ���״ʽ�ṹ��������������ͨ�������ĵ���ֵ�仯��������ά����Ϣ�����Ľ����˸ô������Ļ����ṹ������������������������ѧ���Խ�������ά�����в�������ѧģ�ͣ�ͨ���Ը�ģ�͵����������ά������������֮�临�ӵ�������⡣����ʵ���������ô������ܹ�ʵ�ֶԱ������ⵥ����ά���������ά���Լ���ά...
�������������������ϣ������һ���ܲ�����ά�������ͻ����������������������о��������������ϵ�ѹ��ЧӦ�����������������������˼��,�ֱ������������������Ԫ��ƺ����нṹ��ƺ��о�������˼�����ά������ѧģ��,��ͨ��ʵ���������ά������֤�������������ƵĻ�������ά����������������������Ƽ���۵�������˳�Ժõ��ŵ㣬���Ҳ��ó����нṹ������ҽ�ơ������������˵������м����ά����Ϣ��
���С�ṹ����������������ͨ������MEMS������ͷ�����ײ����������˸߾��ȵIJ���ϵͳ������֤��ͷ���ܵĻ����ϣ������һϵ���жϲ�ͷ�����ֱ����;��ȵ�ʵ�飬������ͬ������������������������ı�ƫ��ֱ�Ϊ41.7552nm��6.05��m��6.16��m��ͬʱ����ɨ��ʵ���н��̻س�ɨ���ֵ�ı�ƫ��Ϊ23.088nm��
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...